Bir sürüjili-iki basgançakly R60-D


Önümiň tanyşdyrylyşy
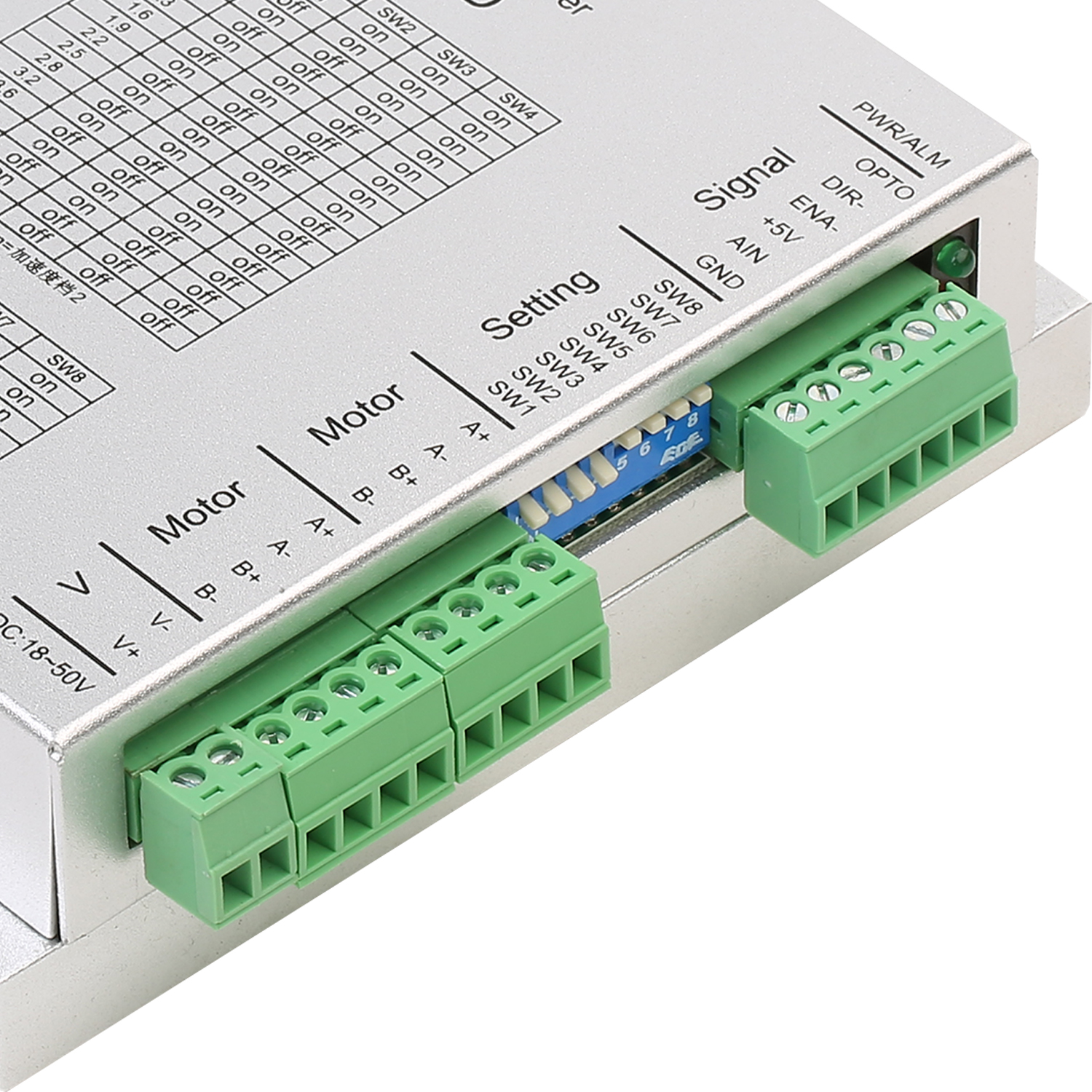


Baglanyşyk
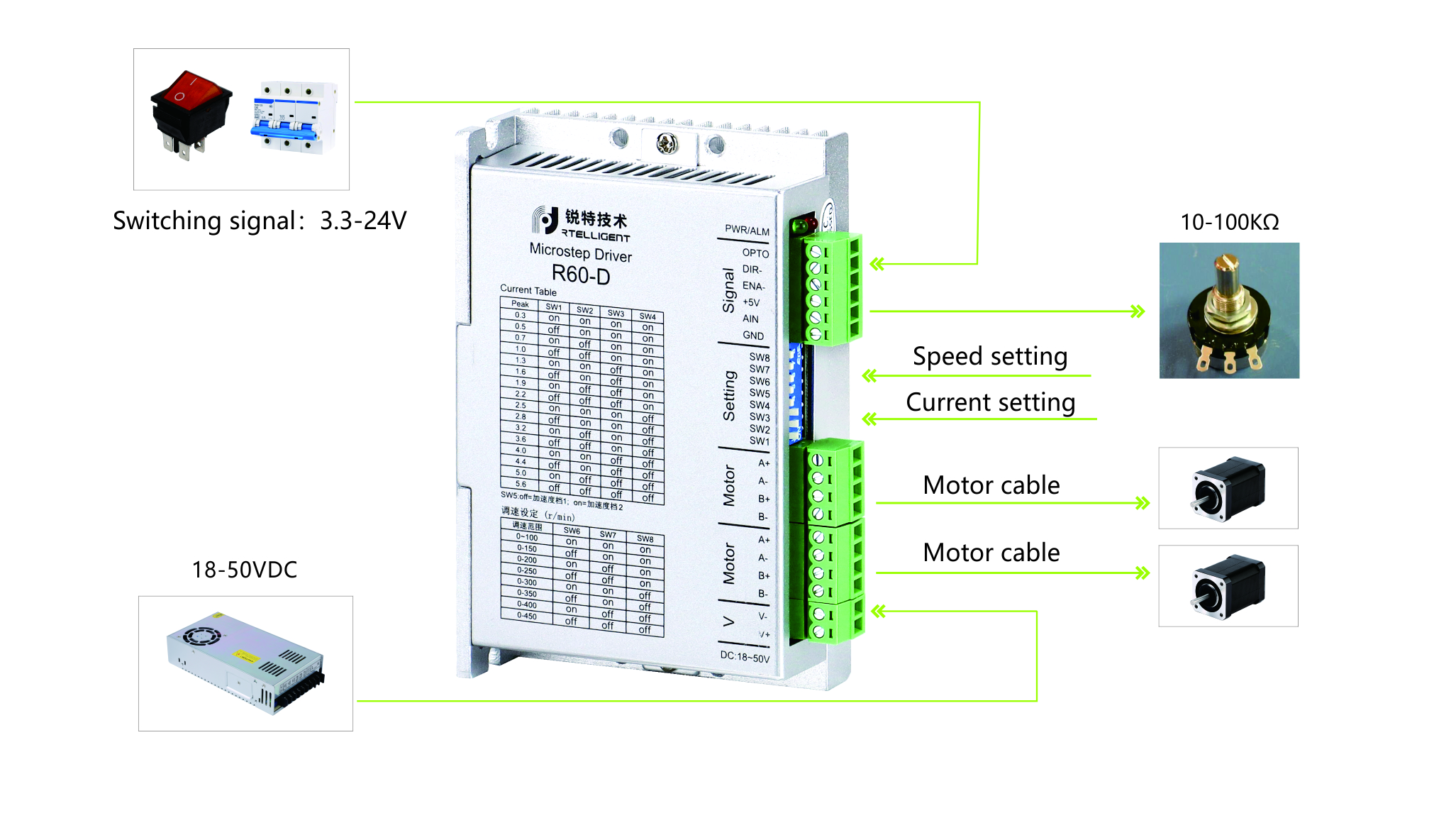
Signal simlerine gözegçilik
| Funksiýa | Bellik | Kesgitleme |
| Kuwwat giriş terminaly | V+ | Pozitiw DC elektrik üpjünçiligini giriziň |
| V- | DC elektrik üpjünçiligi negatiw | |
| Motor 1 Terminal | A+ | Motory birikdiriň 1 Fazaly sargy gutarýar |
| A- | ||
| B+ | Motor 1 B fazasyny iki ujuna birikdiriň | |
| B- | ||
| Motor 2 Terminal | A+ | Motory 2 birikdiriň Bir fazaly sargy gutarýar |
| A- | ||
| B+ | Motor 2 B fazasyny iki ujuna birikdiriň | |
| B- | ||
| Tizlik dolandyryş porty | + 5V | Potensiometriň çep ujy |
| AIN | Potensiometri sazlamak terminaly | |
| GND | Potensiometriň sag tarapy | |
| Başlamak we tersine (potensiometre birikdirilmedik bolsa AIN we GND gysga utgaşdyrylmaly) | OPTO | 24V elektrik üpjünçiligi polo positiveitel terminal |
| DIR- | Terminalyň tersine | |
| ENA- | Terminaly başlaň |
Häzirki sazlama
| Iň ýokary tok (A) | SW1 | SW2 | SW3 | SW4 | Bellik |
| 0.3 | ON | ON | ON | ON | Beýleki häzirki bahalar düzülip bilner |
| 0,5 | Öçürmek | ON | ON | ON | |
| 0.7 | ON | Öçürmek | ON | ON | |
| 1.0 | Öçürmek | Öçürmek | ON | ON | |
| 1.3 | ON | ON | Öçürmek | ON | |
| 1.6 | Öçürmek | ON | Öçürmek | ON | |
| 1.9 | ON | Öçürmek | Öçürmek | ON | |
| 2.2 | Öçürmek | Öçürmek | Öçürmek | ON | |
| 2.5 | ON | ON | ON | Öçürmek | |
| 2.8 | Öçürmek | ON | ON | Öçürmek | |
| 3.2 | ON | Öçürmek | ON | Öçürmek | |
| 3.6 | Öçürmek | Öçürmek | ON | Öçürmek | |
| 4.0 | ON | ON | Öçürmek | Öçürmek | |
| 4.4 | Öçürmek | ON | Öçürmek | Öçürmek | |
| 5.0 | ON | Öçürmek | Öçürmek | Öçürmek | |
| 5.6 | Öçürmek | Öçürmek | Öçürmek | Öçürmek |
Mikro basgançakly sazlama
| Tizlik aralygy | SW4 | SW5 | SW6 | Bellik |
| 0 ~ 100 | ON | ON | ON | Beýleki tizlik aralyklary düzülip bilner |
| 0 ~ 150 | Öçürmek | ON | ON | |
| 0 ~ 200 | ON | Öçürmek | ON | |
| 0 ~ 250 | Öçürmek | Öçürmek | ON | |
| 0 ~ 300 | ON | ON | Öçürmek | |
| 0 ~ 350 | Öçürmek | ON | Öçürmek | |
| 0 ~ 400 | ON | Öçürmek | Öçürmek | |
| 0 ~ 450 | Öçürmek | Öçürmek | Öçürmek |
Haryt maglumatlary
Ynkylapçy R60-D ýeke hereketlendiriji goşa basgançakly sürüjini, basgançakly hereketlendirijiler dünýäsine öňdebaryjy tehnologiýany getirýän oýun üýtgedýän önüm bilen tanyşdyrmak. Ajaýyp aýratynlyklary we deňi-taýy bolmadyk öndürijiligi bilen, R60-D motor dolandyryşyny başdan geçirer.
R60-D iki basgançakly hereketlendirijini takyk we netijeli dolandyrmagy talap edýän programmalar üçin niýetlenendir. Robot bolsun, CNC maşyn bolsun ýa-da awtomatlaşdyryş ulgamy bolsun, bu sürüji ajaýyp netijeleri wada berýär. Ykjam forma faktory we ýönekeý gurnama prosesi bilen, R60-D-ni bar bolan ulgamyňyza birleşdirmek şemaldyr.
R60-D-iň esasy aýratynlyklaryndan biri iki basgançakly hereketlendirijini özbaşdak dolandyrmak ukybydyr. Bu bir wagtyň özünde we sinhron hereketlere mümkinçilik berýär, şeýlelik bilen dizaýnlaryňyzyň takyklygyny we takyklygyny ýokarlandyrýar. Sürüji, hereketlendirijiniň hereketine doly gözegçilik edip, doly ädimlerden mikrosteplere çenli dürli ädim çözgütlerini goldaýar.
R60-D-iň ýene bir görnükli aýratynlygy, ösen häzirki dolandyryş tehnologiýasydyr. Sürüji basgançak hereketlendirijilerine optimal tok paýlanyşyny üpjün etmek üçin çylşyrymly algoritmleri ulanýar, netijede gaty tekiz we takyk hereket edýär. Bu tehnologiýa diňe bir ulgamyň umumy işleýşini gowulandyrmak bilen çäklenmän, ýylylyk öndürmegi azaltmak arkaly hereketlendirijiniň ömrüni hem uzaldýar.
Mundan başga-da, R60-D motoryňyzy potensial zeperlerden goramak üçin ygtybarly gorag ulgamyny özünde jemleýär. Awtoulagyňyzyň agyr iş şertlerinde howpsuz bolmagyny üpjün etmek üçin artykmaç, aşa woltly we aşa gyzýan gorag mehanizmlerini birleşdirýär. Şeýle hem, sürüjide goşmaça howpsuzlyk üpjün edip, daşarky duýduryş enjamyna birikdirilip bilinýän ýalňyş çykyş signaly bar.
R60-D, açyk LED displeýi we içgin dolandyryş düwmeleri bilen ulanmak aňsatlygy üçin döredildi. Bu hereketlendiriji tok, ädim çözgüdi we tizlenme / tizlenme egrileri ýaly dürli parametrlere aňsat konfigurasiýa we gözegçilik etmäge mümkinçilik berýär. Bu sazlamalary gowy düzmek bilen, aýratyn zerurlyklaryňyzy kanagatlandyrmak üçin motoryň işleýşini optimizirläp bilersiňiz.
Gysgaça aýtsak, R60-D ýeke hereketlendiriji goşa basgançakly sürüjisi ösen tehnologiýany ýokary aýratynlyklar bilen birleşdirýän iň täze önümdir. Iki basgançakly hereketlendirijini özbaşdak dolandyrmak ukyby, häzirki tok dolandyryş tehnologiýasy we güýçli gorag ulgamlary bilen bilelikde, takyk, täsirli motor gözegçiligini talap edýän programmalar üçin ideal edýär. R60-D bilen dizaýnlaryňyzy täze belentliklere çykaryp, ajaýyp netijelere ýetip bilersiňiz.
-
 Rtelligent R60-D Ulanyjy gollanmasy
Rtelligent R60-D Ulanyjy gollanmasy