



Impuls dolandyryşy 2-nji tapgyr ýapyk aýlawly basgançak T86


Önümiň tanyşdyrylyşy



Baglanyşyk

Aýratynlyklary
| Elektrik üpjünçiligi | 18-80VAC / 18–110VDC |
| Dolandyryş takyklygy | 4000 impuls / r |
| Impuls tertibi | Ugur we impuls, CW / CCW goşa impuls |
| Häzirki gözegçilik | Servo wektor dolandyryş algoritmi |
| Mikro basgançak sazlamalary | DIP wyklýuçatel sazlamasy ýa-da programma üpjünçiligini düzetmek |
| Tizlik aralygy | Adaty 1200 ~ 1500rpm, 4000rpm çenli |
| Rezonans basyşy | Rezonans nokadyny awtomatiki hasaplaň we IF titremesini saklaň |
| PID parametrini sazlamak | Motor PID aýratynlyklaryny sazlamak üçin programma üpjünçiligi |
| Impulsyň süzülmesi | 2MHz sanly signal süzgüji |
| Duýduryş çykyşy | Artykmaç tok, aşa naprýa .eniýe, ýagdaý ýalňyşlygy we ş.m. |
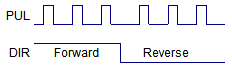
Impuls tertibi
Adaty T seriýaly sürüjiniň signal interfeýsi impuls görnüşinde bolup, T86 iki görnüşli impuls buýruk signallaryny alyp biler.
| Impuls we ugur (PUL + DIR) |
|
| Iki gezek impuls (CW + CCW) | 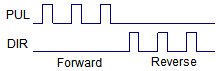 |
Mikro basgançakly sazlama
| Impuls / rev | SW1 | SW2 | SW3 | SW4 | Bellik |
| 3600 | on | on | on | on | DIP wyklýuçateli “3600” ýagdaýyna öwrüldi we synag programma üpjünçiligi beýleki bölümleri erkin üýtgedip biler. |
| 800 | öçürildi | on | on | on | |
| 1600 | on | öçürildi | on | on | |
| 3200 | öçürildi | öçürildi | on | on | |
| 6400 | on | on | öçürildi | on | |
| 12800 | öçürildi | on | öçürildi | on | |
| 25600 | on | öçürildi | öçürildi | on | |
| 7200 | öçürildi | öçürildi | öçürildi | on | |
| 1000 | on | on | on | öçürildi | |
| 2000 | öçürildi | on | on | öçürildi | |
| 4000 | on | öçürildi | on | öçürildi | |
| 5000 | öçürildi | öçürildi | on | öçürildi | |
| 8000 | on | on | öçürildi | öçürildi | |
| 10000 | öçürildi | on | öçürildi | öçürildi | |
| 20000 | on | öçürildi | öçürildi | öçürildi | |
| 40000 | öçürildi | öçürildi | öçürildi | öçürildi |
Önümiň beýany
Iň ösen impuls bilen dolandyrylýan iki fazaly ýapyk aýlawly sürüjini, öňdebaryjy tehnologiýany ajaýyp öndürijilik we ygtybarlylyk bilen birleşdirýän ynkylap önümi bilen tanyşdyrmak. Bu öňe gidiş ädim sürüjisi, dürli programmalar üçin optimal netijeliligi we takyklygy üpjün edip, takyk hereketlendirijileriň dolandyrylyşyny üýtgetmek üçin döredildi.
Bu ajaýyp basgançakly sürüjiniň esasy aýratynlyklaryndan biri, takyk gözegçiligi üpjün edýän we iş şertlerini talap edýän ýagdaýynda-da ädim ýitgilerini aradan aýyrýan ýapyk görnüşli ulgamdyr. Öňdebaryjy impuls dolandyryş mehanizmi bilen, hereketlendiriji takyk ýerleşişini, göwnejaý işlemegini we titremäniň peselmegini kepillendirýär, ajaýyp öndürijiligi we durnuklylygy üpjün edýär.
Impuls bilen dolandyrylýan iki fazaly ýapyk aýlawly basgançak sürüjisi hem berk we ykjam dizaýna eýe we iň soňky mikroprosessor tehnologiýasyny öz içine alýar. Bu has ýokary tork çykaryşyny gazanmaga we has agyr ýükleri dolandyrmaga mümkinçilik berýär, bu bolsa senagat awtomatizasiýasy, robot enjamlary, CNC maşyn gurallary we beýleki ýokary takyk programmalar üçin amatly bolýar. Onuň ýokary çözgütli hereketlendiriji dolandyryş algoritmi takyk hereketi dolandyrmagy üpjün edýär we çylşyrymly hereketi talap edýän meseleler üçin ajaýyp saýlawy edýär.
Şeýle hem, hereketlendiriji islendik ýalňyşlyklary ýa-da gyşarmalary awtomatiki kesgitleýän we düzedýän akylly öz-özüňi düzgünleşdirmek bilen enjamlaşdyrylandyr. Bu yzygiderli öndürijiligi üpjün edýär we ulanyjylaryň wagtyny we güýjüni tygşytlap, el bilen düzedişleriň ýa-da kalibrlemäniň zerurlygyny azaldýar.
Mundan başga-da, impuls bilen dolandyrylýan iki fazaly ýapyk aýlawly basgançakly hereketlendirijiler ýokary derejeli we bipolýar we birtaraplaýyn basgançakly hereketlendirijileri goşmak bilen dürli hereketlendiriji görnüşlere laýyk gelýär. Simpleönekeý birikdiriş interfeýsi we ulanyjylara amatly dolandyryş paneli, bar bolan ulgamlar bilen birleşmegi we işlemegi aňsatlaşdyrýar, gurnama wagtyny we çylşyrymlylygyny azaldýar.
Gysgaça aýtsak, impuls dolandyrylýan iki fazaly ýapyk aýlawly basgançak sürüjisi, bir güýçli enjamda täzeligi, takyklygy we ygtybarlylygy birleşdirýän oýun üýtgedýän önümdir. Closedapyk aýlawly dolandyryş, impulslary dolandyrmagyň ösen mehanizmleri, öz-özüni kadalaşdyrmak mümkinçilikleri we köpugurlylygy ýaly özboluşly aýratynlyklary iň ýokary takyklygy we netijeliligi talap edýän programmalar üçin ideal edýär. Basgançakly motor dolandyryşynyň geljegini başdan geçiriň we bu ajaýyp önüm bilen öndürijiligiň we öndürijiligiň täze derejelerini açyň.
-
 Rtelligent T86 ulanyjy gollanmasyny redaktirläň
Rtelligent T86 ulanyjy gollanmasyny redaktirläň